3 - EtherCAT Configurator - Nodes setting
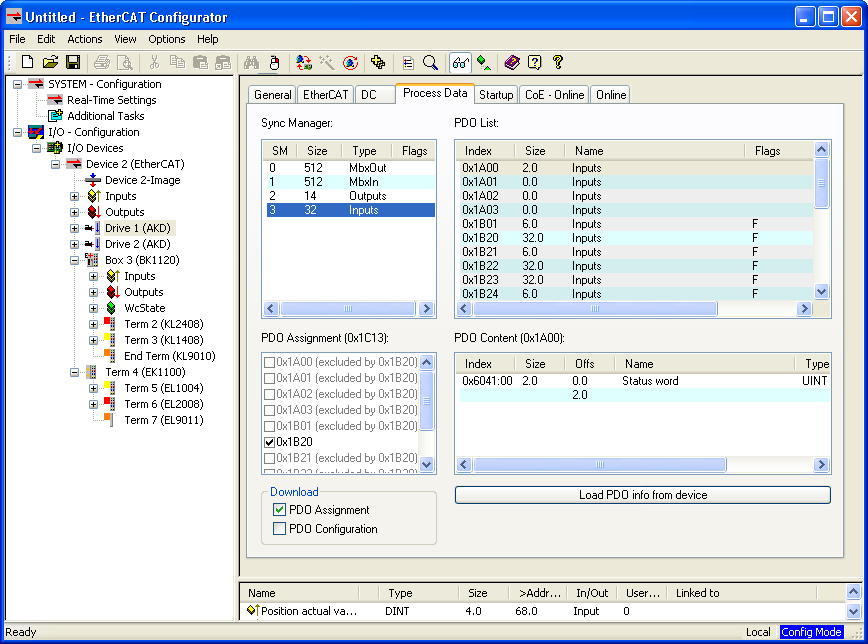
Define the type of data that will be exchanged in the PDO between the device and the nodes. For the AKD drives, proceed as following to select the standard KAS/AKD system PDO (PDO Assignment):
- Select an EtherCAT
 EtherCAT is an open, high-performance Ethernet-based fieldbus system. The development goal of EtherCAT was to apply Ethernet to automation applications which require short data update times (also called cycle times) with low communication jitter (for synchronization purposes) and low hardware costs node (Drive 1 (AKD)) and select the “Process data” thumbnail.
EtherCAT is an open, high-performance Ethernet-based fieldbus system. The development goal of EtherCAT was to apply Ethernet to automation applications which require short data update times (also called cycle times) with low communication jitter (for synchronization purposes) and low hardware costs node (Drive 1 (AKD)) and select the “Process data” thumbnail. - Select in the “Synch manager” window, Input item then “0x1B20” in the “PDO Assignment Window”.
- Select in the “Synch manager” window, Output item then “0x1720” in the “PDO Assignment Window”.
- Repeat the operation for drive 2.
- Perform the same kind of operation for the non-standard items.
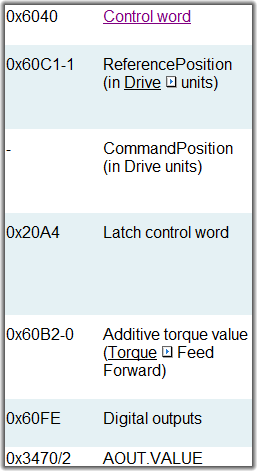
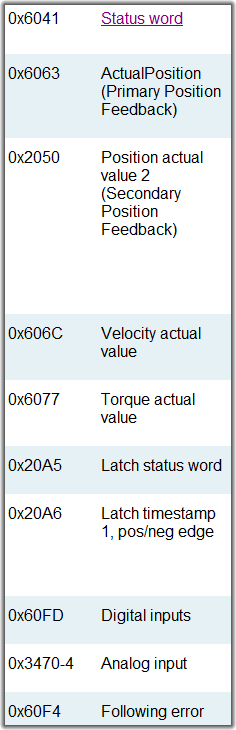
This PDO mapping sets up the following parameters in the PDO channel:
| Controller to Drive | Drive to Controller |
|---|---|
|
|







